【写真1】 国際イノベーションコンテスト2022世界大会の様子(写真提供:iCAN)
2023年6月25日から26日の2日間、国立京都国際会館(京都市)において「国際イノベーションコンテスト2022(International Contest of InnovAtioN(以下、「iCAN'22」)」及びiCAN'23の世界大会が同時開催され、NPO法人 natural science 『科学・技術講座』受講生の津田慶音さん(仙台市立仙台青陵中等教育学校5年、『科学・技術講座』受講歴3年)と講師の日下遼太郎さん(国立仙台高等専門学校情報電子システム工学専攻2年、『科学・技術講座』指導歴1年)が提案したIoTアプリケーション「カタコラナイザー(Katakolyzer)」がiCAN'22世界3等に入賞しました。natural science 『科学・技術講座』チームのiCAN世界大会入賞は4年連続、通算8回目です。
【写真2】国際イノベーションコンテスト2022世界大会の様子(写真提供:iCAN)
iCANは、各種センサ(MEMSデバイス)を用いたアプリケーションを提案し、試作した成果を競い合う、学生向けの国際ものづくりコンテストです。今回の世界大会はコロナ禍の影響で延期されていたiCAN'22とiCAN'23の同時開催となり、世界各国・地域から予選を勝ち抜いた23チームが出場し、そのアイディアの革新性や試作品の完成度を競い合いました。
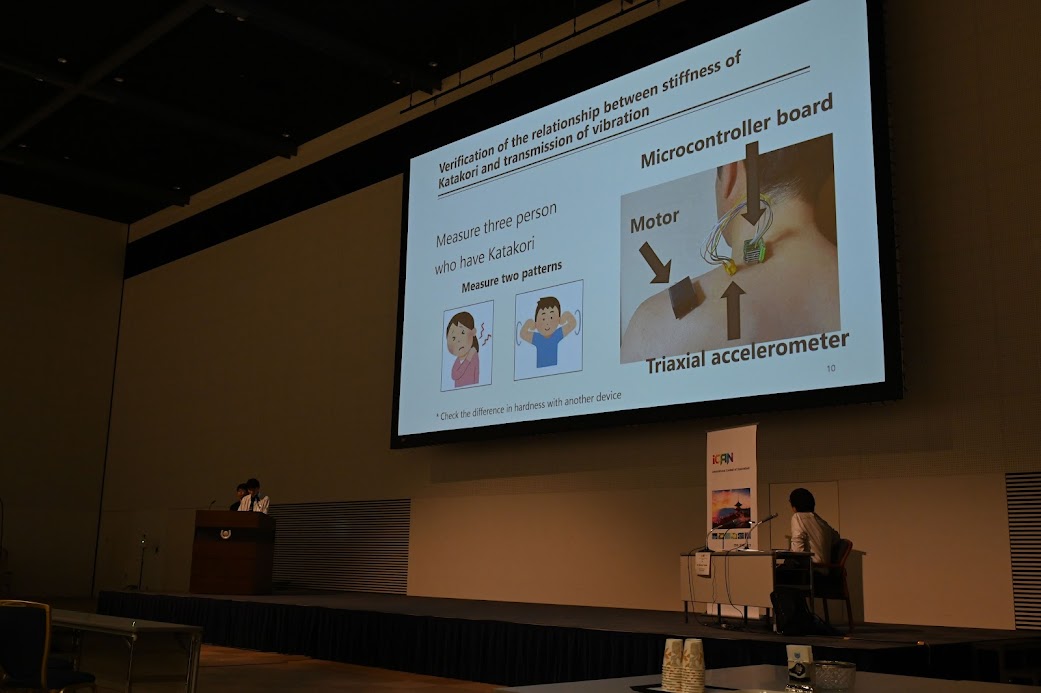
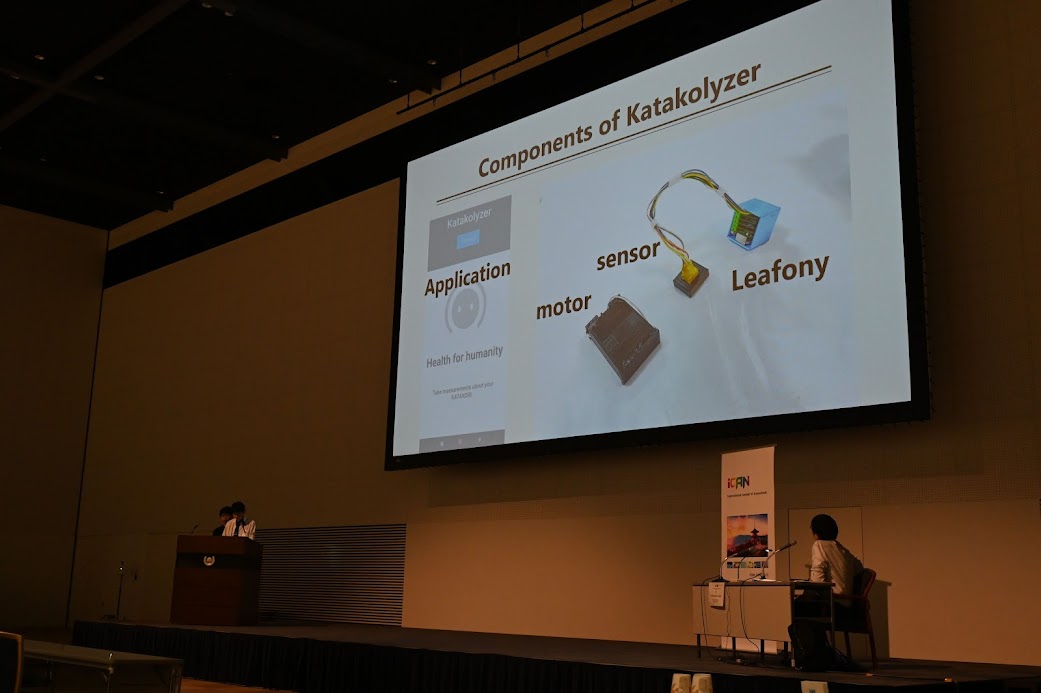
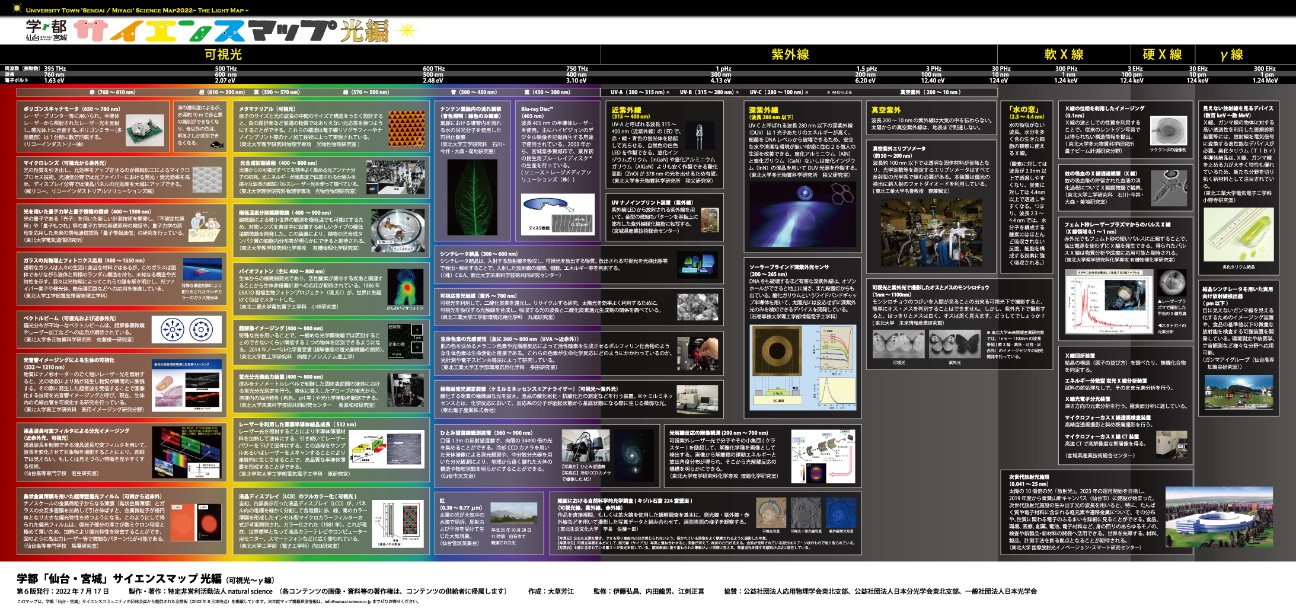
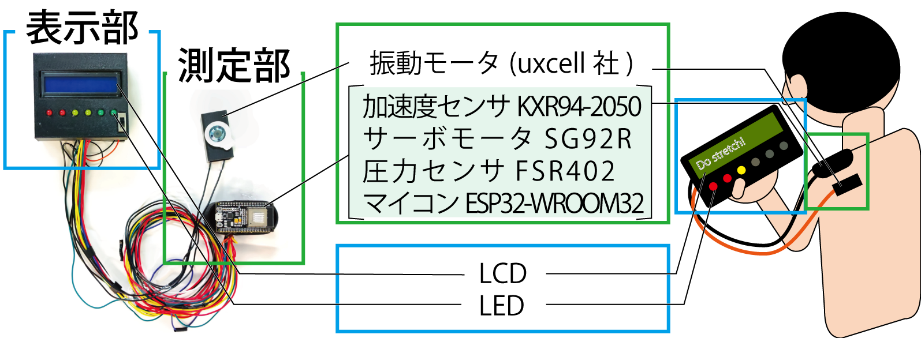
津田さんと日下さんが提案した「カタコラナイザー(Katakolyzer)」は、肩こりの度合いを従来の筋硬度計等とは異なる新しい原理で測定するIoTアプリケーションです。肩こりが生じる僧帽筋の振動特性から肩こり度合いを評価するアルゴリズムを開発し、結果はBluetoothでスマートフォンに送信し、専用アプリで確認することができます。
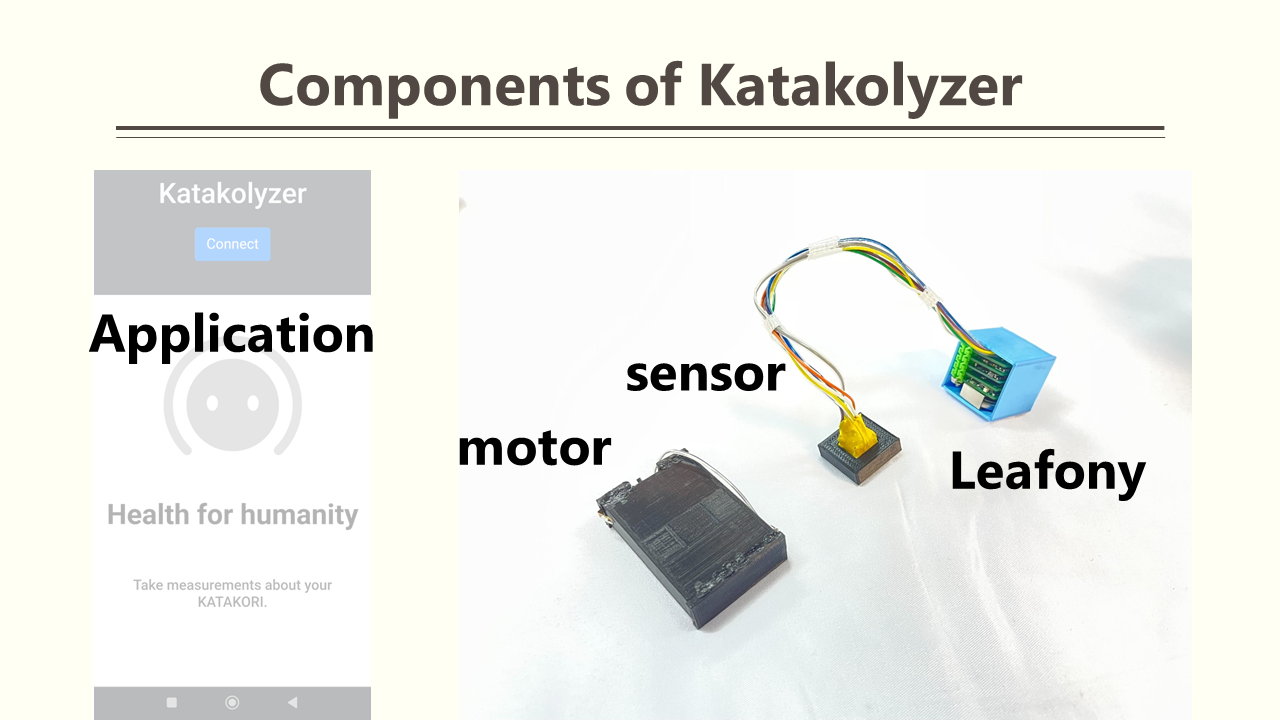
【写真3】 提案したIoTアプリケーション「カタコラナイザー」の構成

【写真4】 iCAN'22世界3等に入賞したNPO法人 natural science 『科学・技術講座』受講生の津田慶音さん(仙台市立仙台青陵中等教育学校5年)と講師の日下遼太郎さん(国立仙台高等専門学校情報電子システム工学専攻2年、『科学・技術講座』指導歴1年)
世界大会を終えて、チームリーダーの津田さんは「従来の測定方式とは異なる新規方法を考え、実験で実証することに苦労したが、世界大会では自分たちが提案したアルゴリズムに多くの人から興味を持ってもらえて嬉しかった。また、本アプリでは測定のために肩に振動を加えるが、『その振動でマッサージはできるのか』という質問を受け、マッサージ機に本アプリの測定機構を搭載する新たなアイディアも得られた。さらに現バージョンでは、マイコン等の部品は既製品を使用している都合上、どうしてもサイズの制約が大きいが、今後は基板の設計等も行い、より小型化して使いやすいアプリを目指したい」と話しています。
◆ 自らのアイディアを形にする基礎力と創造力を育成
natural scienceは、自らのアイディアを形にする科学的思考力と創造力を育成するための『科学・技術講座』を2008年から開発・開講しています。受講生や講師には、形にしたアイディアを発表する場として各種コンテストへの出場を推奨しています。
これまでiCANには日本代表チームとして世界大会に4年連続、通算8チームが出場し、iCAN'22、iCAN'21、iCAN'20、iCAN'19で世界第3等、iCAN'17世界第1位並びに世界3等、iCAN'15世界1位、iCAN'13で世界3等の入賞実績があります。
☆ natural science 科学・技術講座 詳細はこちら
-≫https://www.science-and-technology.net/
【関連記事】
◆「第13回 国際イノベーションコンテスト2022」国内予選大会 natural science チームが第3位入賞、4年連続通算8回目の世界大会出場へ
◆「第11回 国際イノベーションコンテスト(iCAN'20)世界大会」 高校2年生が発明した新発想のヘッドフォン型IoTアプリが世界3等入賞
◆「第10回 国際イノベーションコンテスト(iCAN'19)」国内予選で第2位&第3位入賞、世界大会で世界3等入賞!
◆「第8回 国際イノベーションコンテスト(iCAN'17)」世界大会で世界1位&第3位に入賞!
◆「第6回国際ナノ・マイクロアプリケーションコンテスト(iCAN'15)」世界大会で世界1位入賞!
◆「第3回国際ナノ・マイクロアプリケーションコンテスト(iCAN'12)」世界大会で世界3等入賞!
<本件に関するお問合せ先>
特定非営利活動法人natural science
TEL: 022-721-2035 E-mail: info@natural-science.or.jp
https://www.natural-science.or.jp
]]>
 ]]>
]]>



 佐々木ら「natural science 科学・技術講座」の講師や受講生たちで開発した「満腹チェッカー」は、食事中の満腹の度合いを、ベルトとお腹の間の圧力(お腹の張り具合)を圧力センサで測定することによって推定し、リアルタイムでユーザに通知するベルト型IoTアプリケーションです。満腹中枢が刺激されるまでには食事開始から約20分のタイムラグがあるため、IoTを活用し、このタイムラグを解消することで、食べすぎや食べ残しを防ごうと着想しました。
佐々木ら「natural science 科学・技術講座」の講師や受講生たちで開発した「満腹チェッカー」は、食事中の満腹の度合いを、ベルトとお腹の間の圧力(お腹の張り具合)を圧力センサで測定することによって推定し、リアルタイムでユーザに通知するベルト型IoTアプリケーションです。満腹中枢が刺激されるまでには食事開始から約20分のタイムラグがあるため、IoTを活用し、このタイムラグを解消することで、食べすぎや食べ残しを防ごうと着想しました。

 ・犬塚 悠月(学校法人角川ドワンゴ学園 N高等学校2年、『科学・技術講座』受講歴3年)
・犬塚 悠月(学校法人角川ドワンゴ学園 N高等学校2年、『科学・技術講座』受講歴3年)